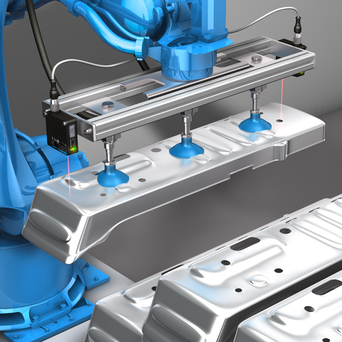
机器人抓具中的距离测量
在一个真空夹持器中安装两个 LAT-52 距离传感器,以确定与顶部金属板部分的距离。传感器确定距离后,按照与金属板的相对关系控制夹持器的位置,同时控制机器人的接近速度,从而实现实时优化夹取过程。

| +86 189 1374 8271 |
| customer-service@di-soric.cn |
| 周一至周五的日常工作时间 |
| +86 189 1377 2821 |
| service@di-soric.cn |
| 周一至周五的日常工作时间 |